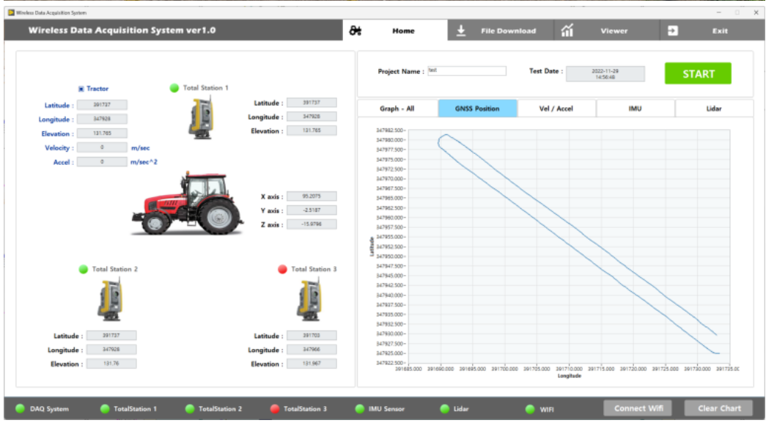
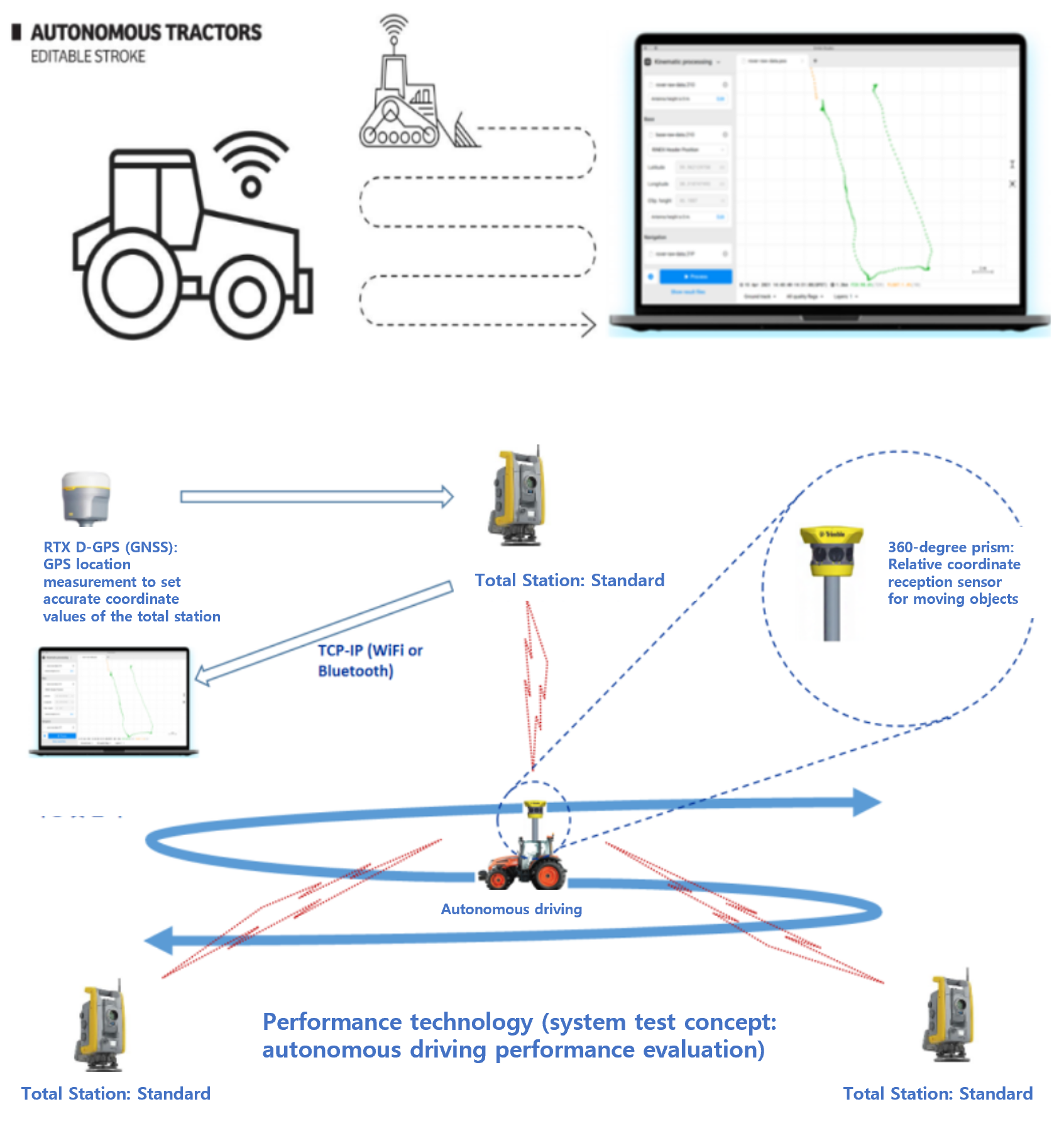
1. Agricultural robot autonomous work performance evaluation system
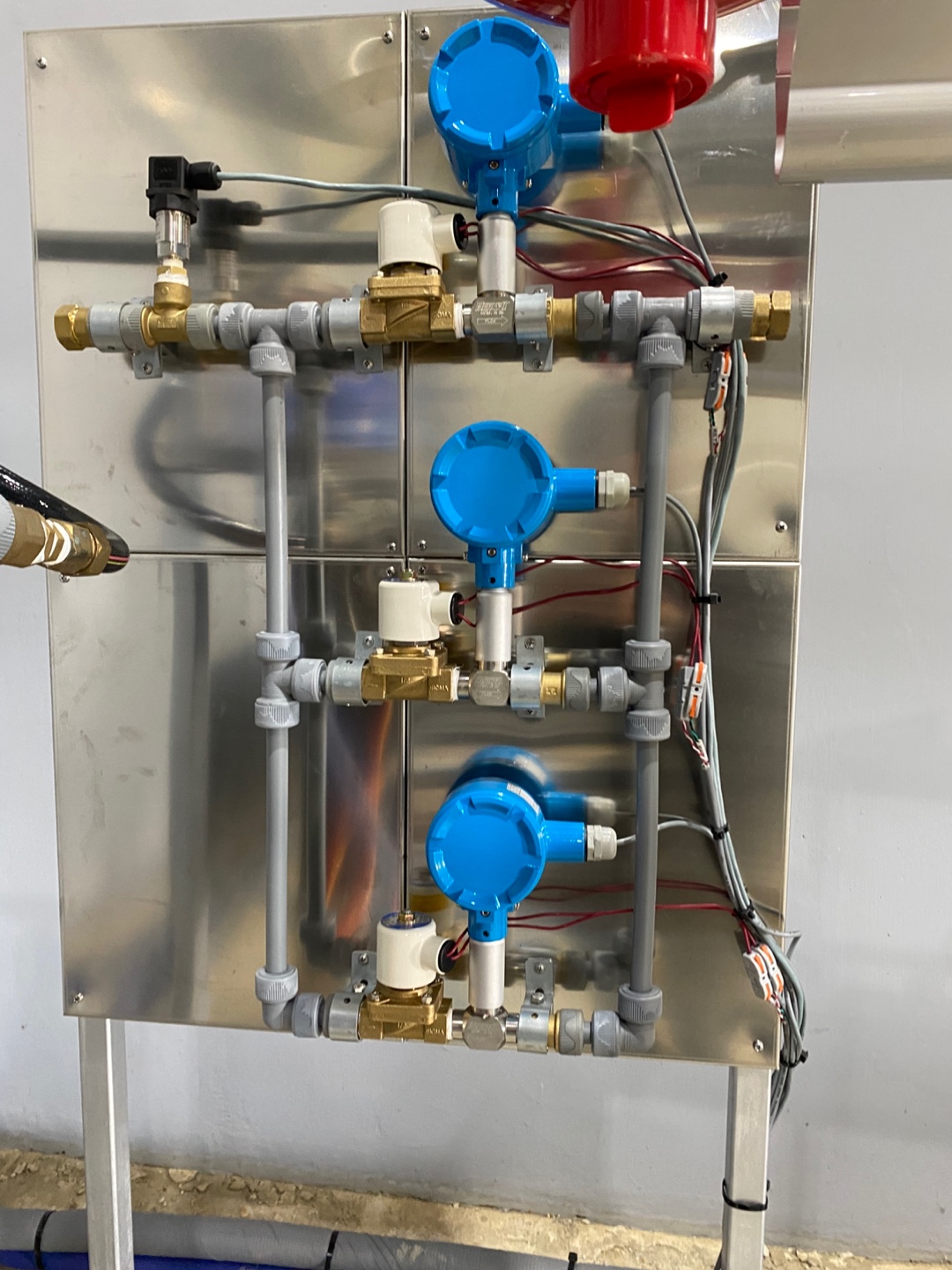
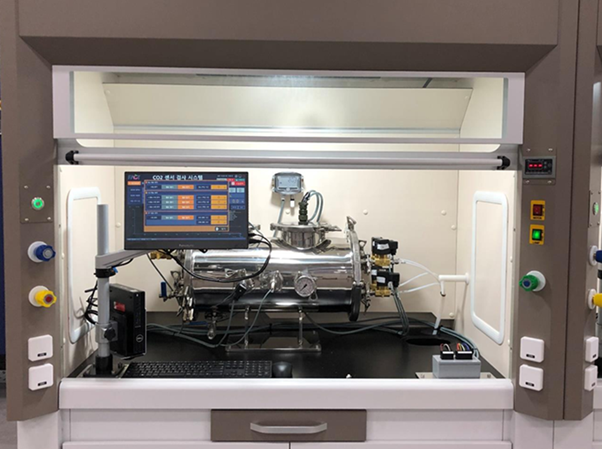
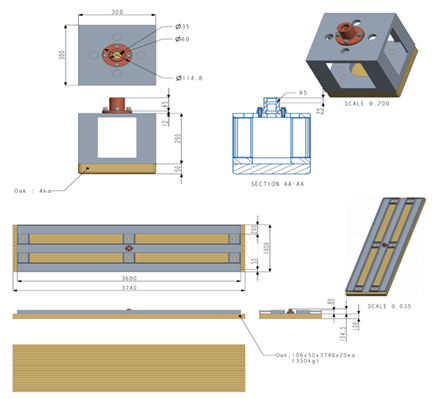
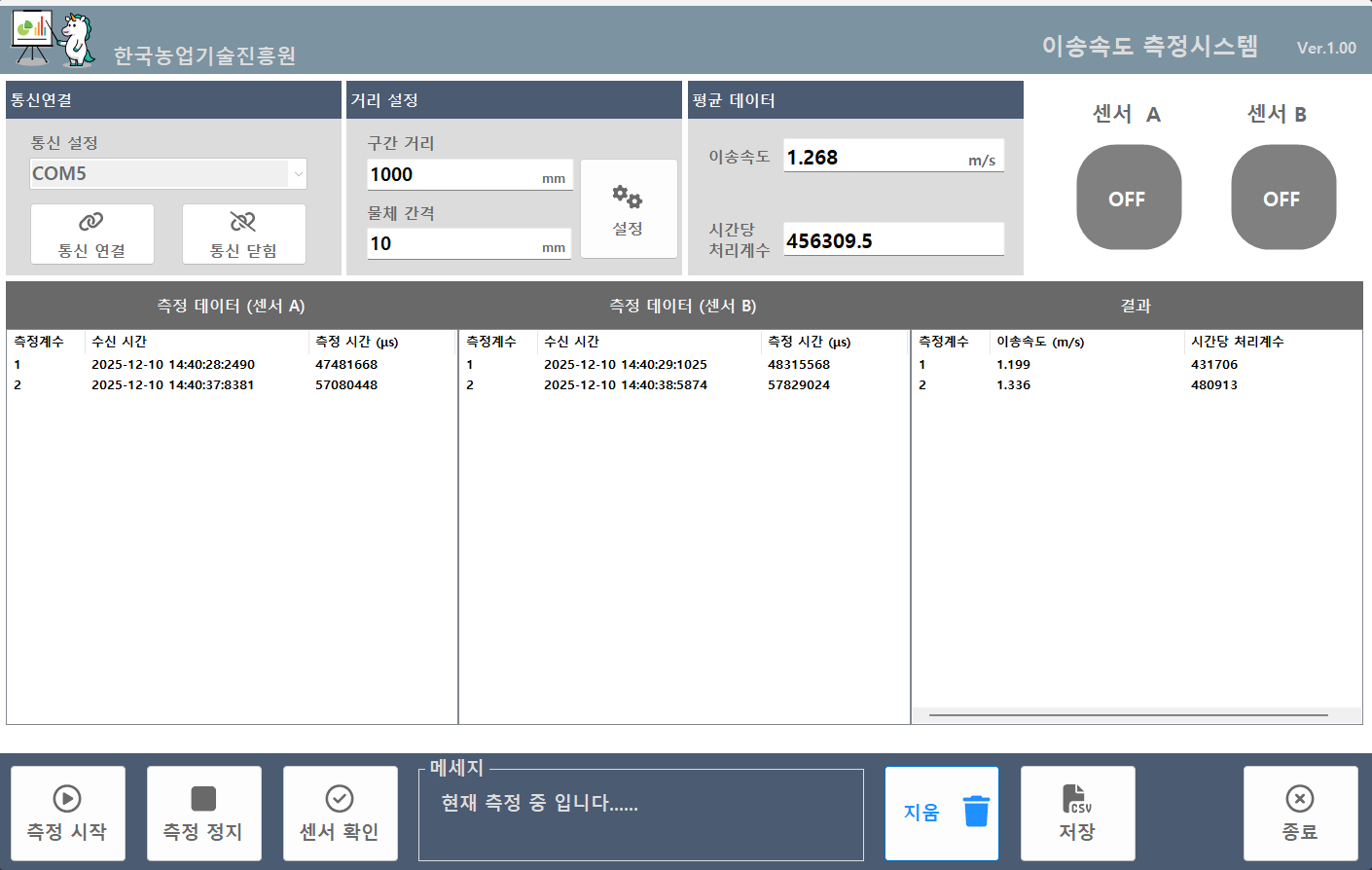
2. Environmental Data Logger
Collects data such as temperature, humidity, sun, pressure, precipitation, vibration, gas, co2, etc.


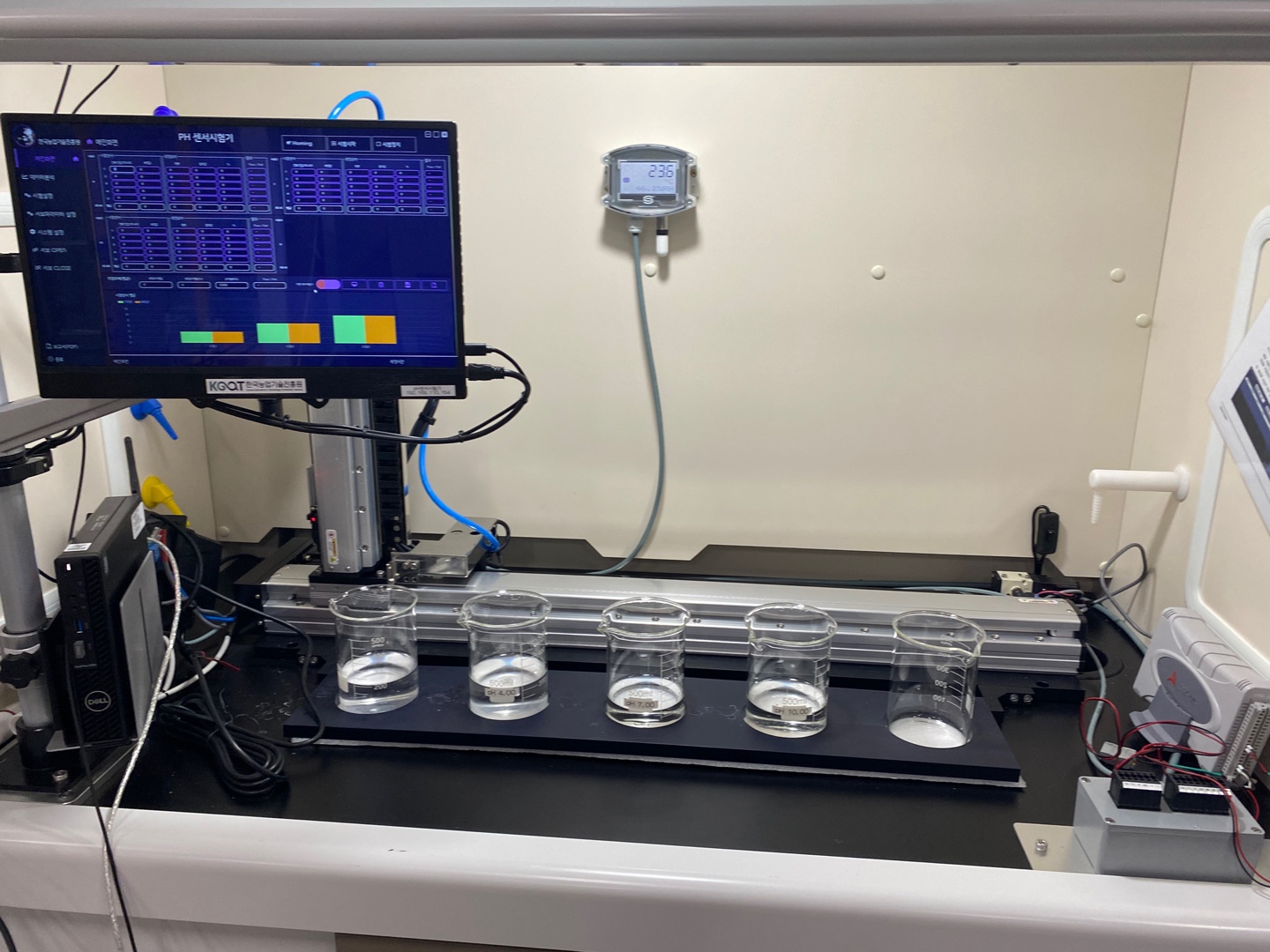
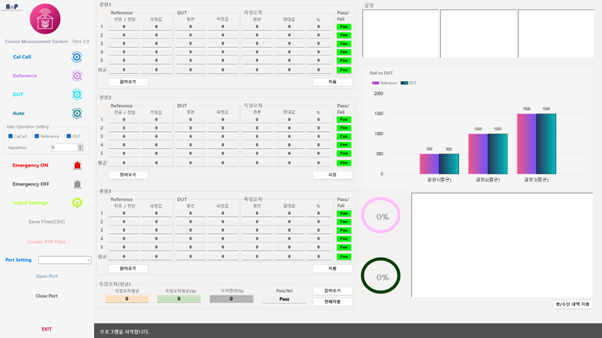
3. PH Sensor Tester
Automatically measure PH sensors and collect data using robots.