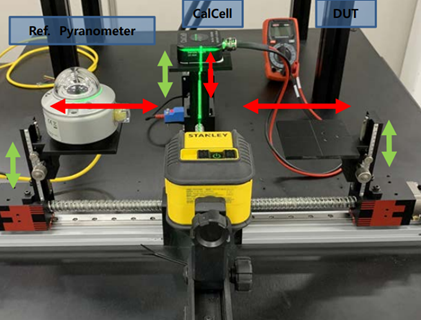
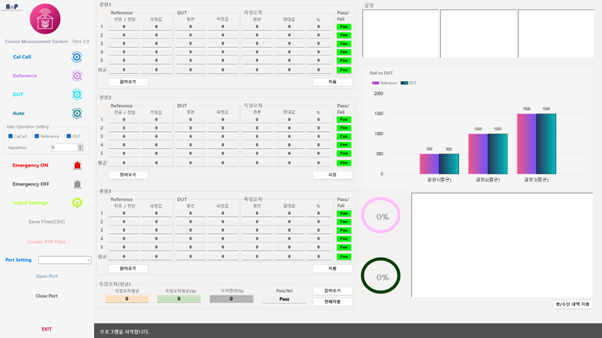
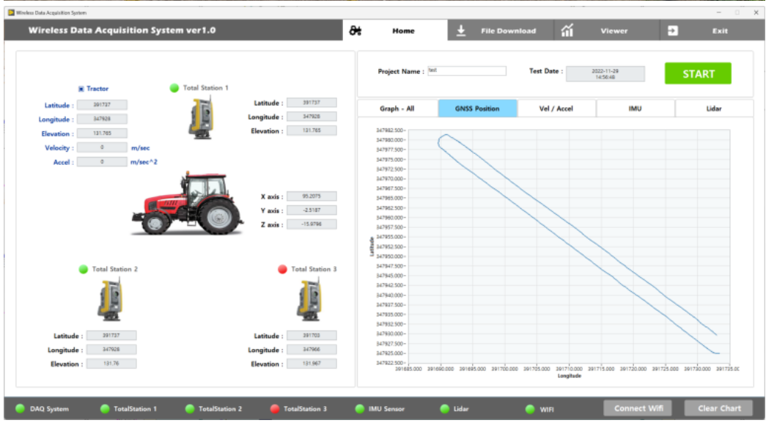
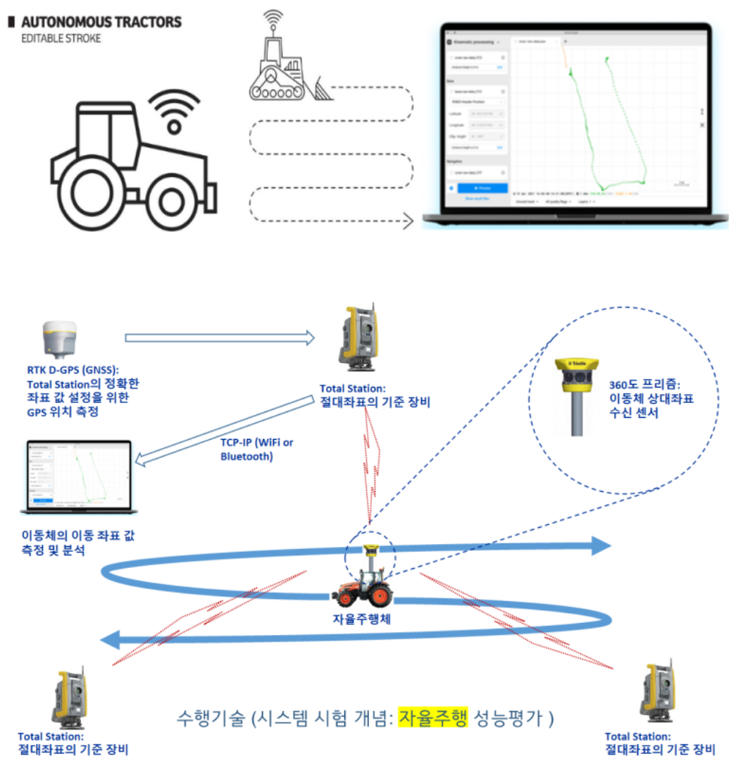
1. 농업용 로봇 자율작업 성능평가 시스템
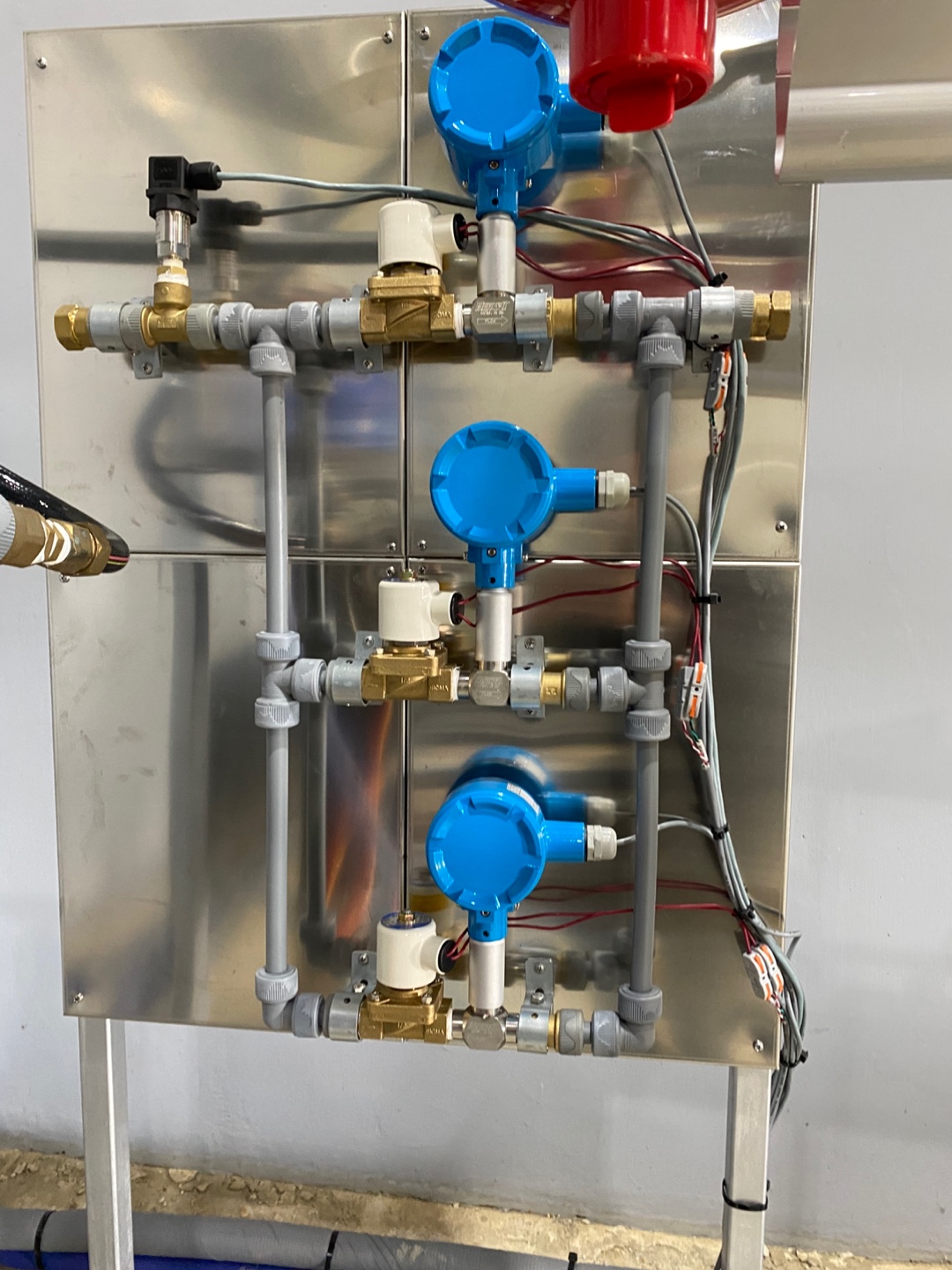
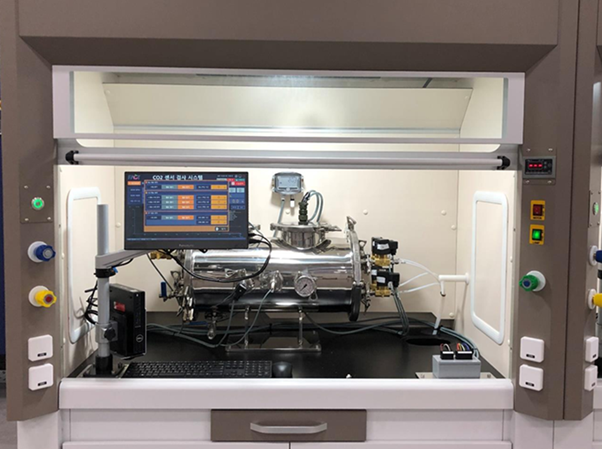
2. Environmental Data Logger
온도, 습도, 태양, 압력, 강수, 진동, 가스, co2 등의 데이터를 수집 한다.


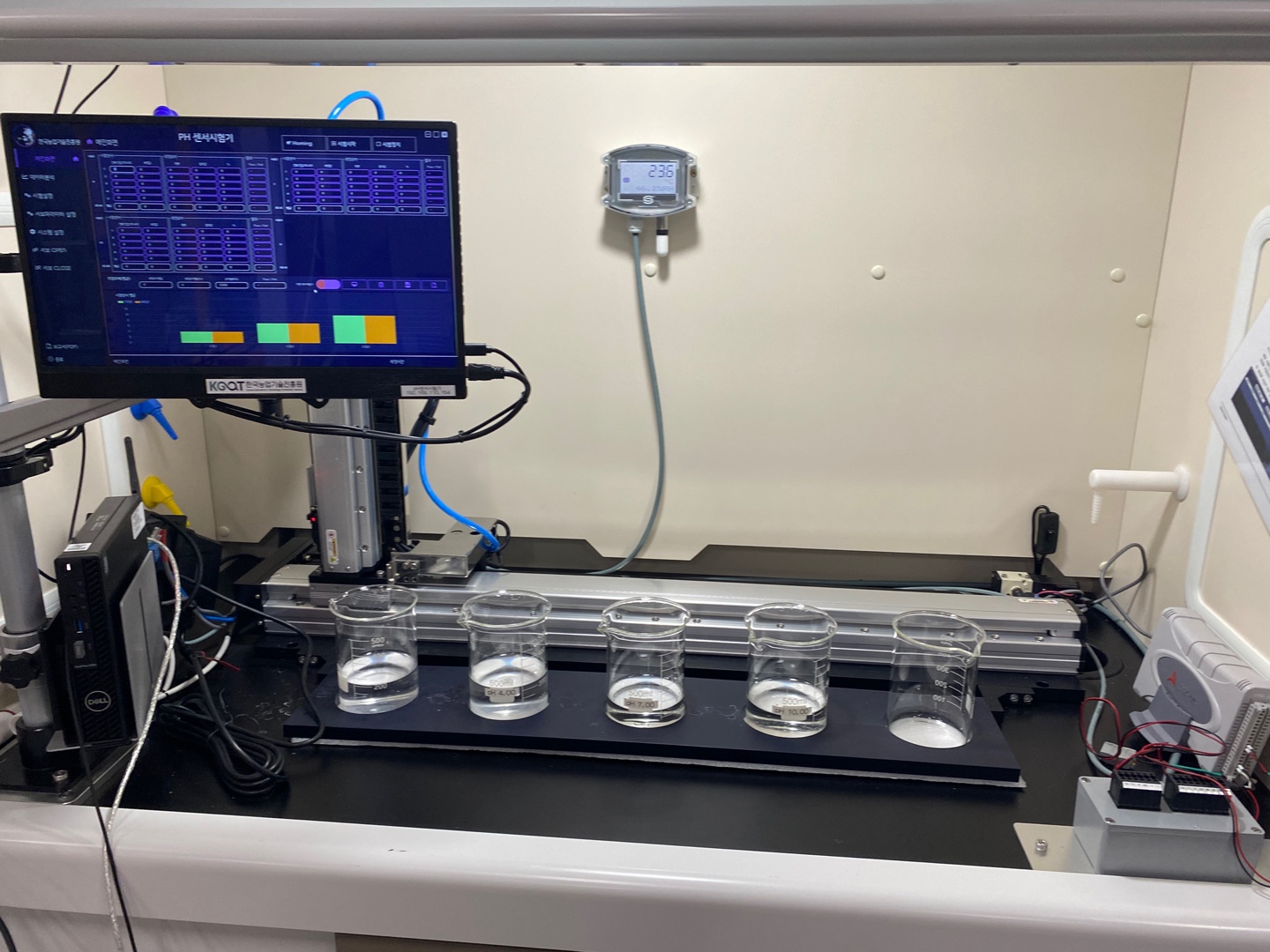
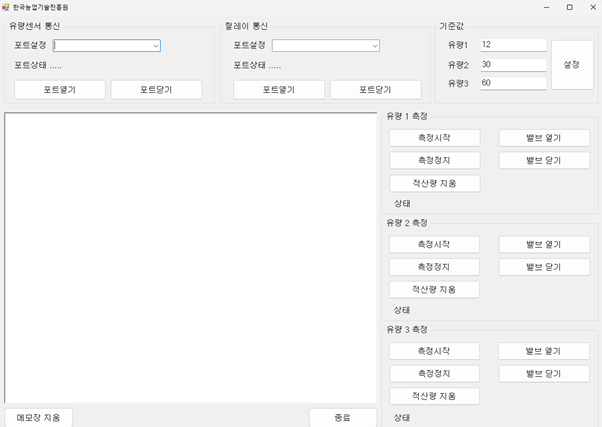
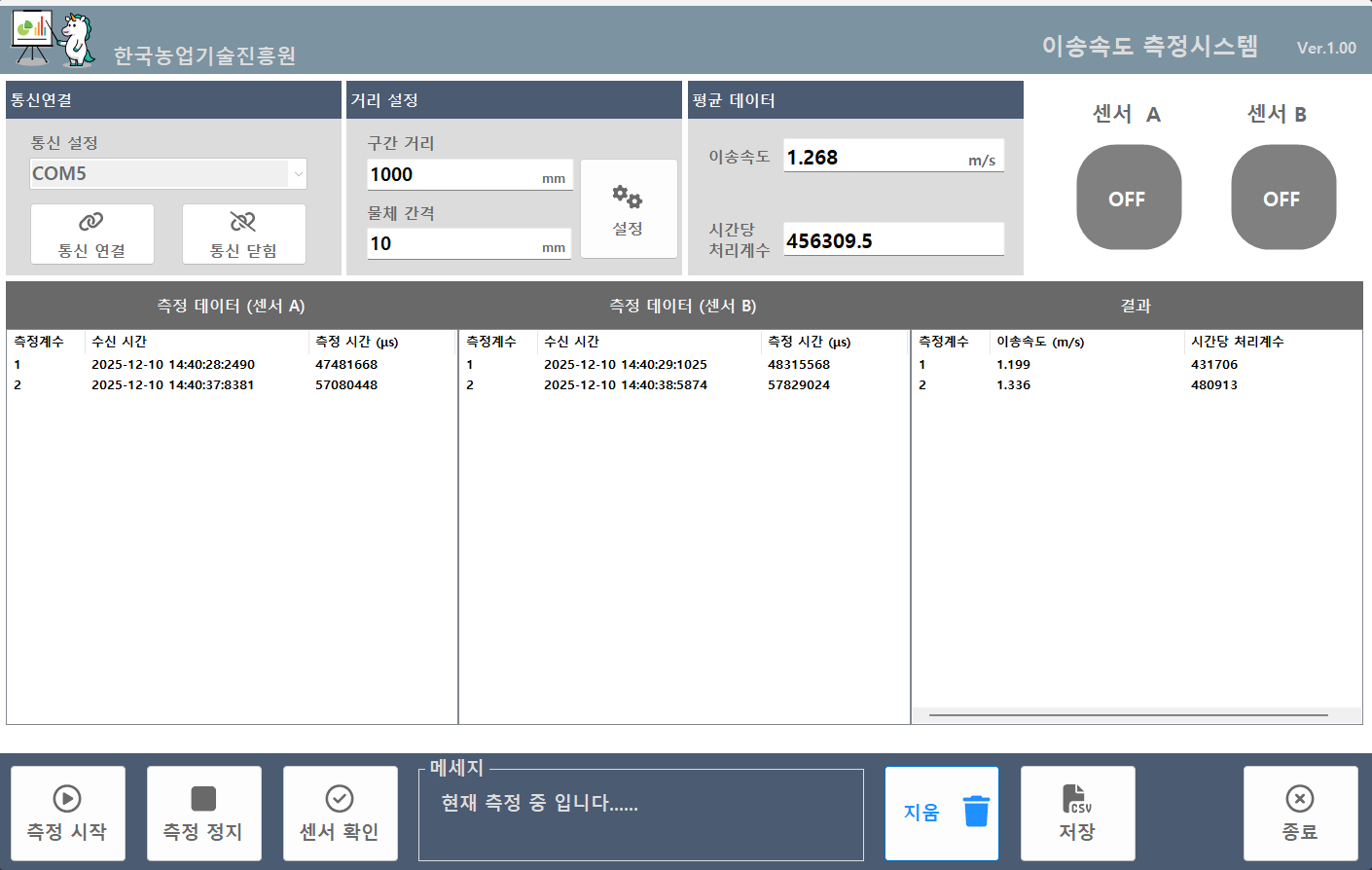
3. PH센서 시험기
로봇을 활용하여 자동으로 PH 센서를 측정하고 데이터를 수집 한다.
온도, 습도, 태양, 압력, 강수, 진동, 가스, co2 등의 데이터를 수집 한다.
로봇을 활용하여 자동으로 PH 센서를 측정하고 데이터를 수집 한다.